Optimal control problem 2¶
Conway and K. M. Larson : Collocation Versus Differential Inclusion in Direct Optimization
Use single shooting for transcription
[1]:
import simulatetraj as a
import casadi as cs
import matplotlib.pyplot as plt
define the integrator
integrator grid and transcription grid will match for single shooting
[2]:
sym_dict=a.get_symbols(n_x=2,n_u=1,n_p=0,N=50,cs_type=cs.SX)
x=sym_dict['x']
u=sym_dict['u']
f=cs.vertcat(x[1],-x[1]+u)
_=a.scale_ode(sym_dict=sym_dict,f=f)
_=a.integrator(sym_dict=sym_dict,options=['rk',{}])
[3]:
nlp=cs.Opti()
X0=nlp.variable(sym_dict['n_x'],1)
U =nlp.variable(sym_dict['n_u'],sym_dict['N'])
obj=cs.sumsqr(U)*2/sym_dict['N']
x0=cs.DM([0,0])
a.simulate(sym_dict=sym_dict,t0=0,tf=2,x0=x0,u=U)
X=sym_dict['x_res']
nlp.minimize(obj)
nlp.subject_to(X0-x0==0)
nlp.subject_to(cs.horzcat(1,-2.694528)@X[:,-1]+1.155356==0)
nlp.solver('ipopt')
nlp.set_initial(U,cs.np.linspace(0,1,sym_dict['N']))
sol=nlp.solve()
obj_val=sol.value(nlp.f)
print(f'Objective value: Paper - 0.577678 | code - {obj_val}')
******************************************************************************
This program contains Ipopt, a library for large-scale nonlinear optimization.
Ipopt is released as open source code under the Eclipse Public License (EPL).
For more information visit https://github.com/coin-or/Ipopt
******************************************************************************
This is Ipopt version 3.14.11, running with linear solver MUMPS 5.4.1.
Number of nonzeros in equality constraint Jacobian...: 52
Number of nonzeros in inequality constraint Jacobian.: 0
Number of nonzeros in Lagrangian Hessian.............: 50
Total number of variables............................: 52
variables with only lower bounds: 0
variables with lower and upper bounds: 0
variables with only upper bounds: 0
Total number of equality constraints.................: 3
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
0 6.7346939e-01 4.81e-02 2.75e-02 -1.0 0.00e+00 - 0.00e+00 0.00e+00 0
1 5.7790126e-01 4.44e-16 1.39e-17 -2.5 3.43e-01 - 1.00e+00 1.00e+00f 1
Number of Iterations....: 1
(scaled) (unscaled)
Objective...............: 5.7790126446789747e-01 5.7790126446789747e-01
Dual infeasibility......: 1.3877787807814457e-17 1.3877787807814457e-17
Constraint violation....: 4.4408920985006262e-16 4.4408920985006262e-16
Variable bound violation: 0.0000000000000000e+00 0.0000000000000000e+00
Complementarity.........: 0.0000000000000000e+00 0.0000000000000000e+00
Overall NLP error.......: 4.4408920985006262e-16 4.4408920985006262e-16
Number of objective function evaluations = 2
Number of objective gradient evaluations = 2
Number of equality constraint evaluations = 2
Number of inequality constraint evaluations = 0
Number of equality constraint Jacobian evaluations = 2
Number of inequality constraint Jacobian evaluations = 0
Number of Lagrangian Hessian evaluations = 1
Total seconds in IPOPT = 0.005
EXIT: Optimal Solution Found.
solver : t_proc (avg) t_wall (avg) n_eval
nlp_f | 0 ( 0) 3.00us ( 1.50us) 2
nlp_g | 0 ( 0) 184.00us ( 92.00us) 2
nlp_grad_f | 0 ( 0) 29.00us ( 9.67us) 3
nlp_hess_l | 1.00ms ( 1.00ms) 878.00us (878.00us) 1
nlp_jac_g | 1.00ms (333.33us) 1.19ms (396.33us) 3
total | 9.00ms ( 9.00ms) 5.84ms ( 5.84ms) 1
Objective value: Paper - 0.577678 | code - 0.5779012644678975
plot results
[4]:
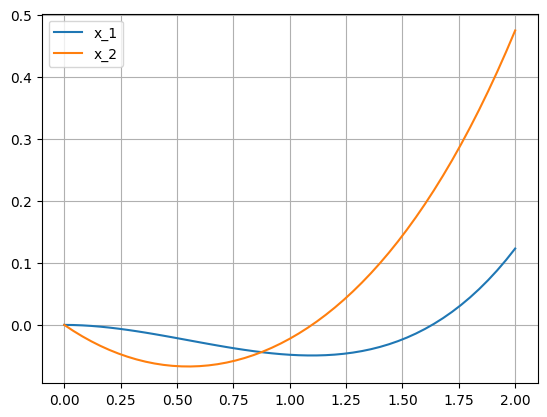
plt.figure()
plt.plot(cs.np.linspace(0,2,50+1),sol.value(X[0,:]).flatten(),label='x_1')
plt.plot(cs.np.linspace(0,2,50+1),sol.value(X[1,:]).flatten(),label='x_2')
plt.legend()
plt.grid(True)
plt.show()
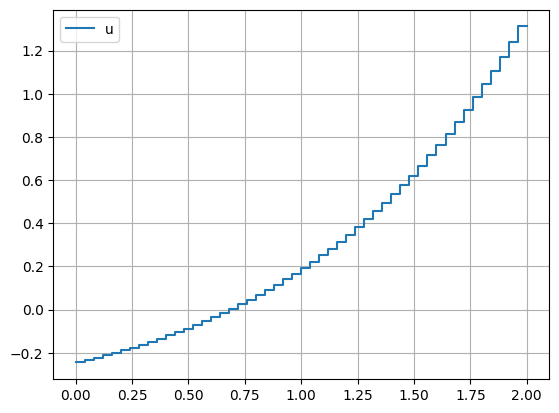
plt.figure()
plt.step(cs.np.linspace(0,2,50+1),cs.np.hstack((cs.np.nan,sol.value(U))),label='u')
plt.legend()
plt.grid(True)
plt.show()
Note that the single shooting method is not robust and may be prone to failure. Multiple shooting methods are recommended.